Launch of LV2c in Brothers on June 27, 2010

This was our second "return to flight" launch for the LV2 series. The airframe and recovery systems remained unchanged from last flight. We added a roll control module to as a runner up to full active guidance. We ran an ARTS-2 and a Telemetrum for the flight computers. The motor was an AeroTech N2000W. This page is a container for all the relevant data from the launch of the vehicle including pictures and video.
Design
Overview
We started using Solid Works on academic licenses to model the entire rocket. This was a big success, tracking all of our parts and giving reasonably accurate CG and mass estimations as well as a bill of materials and assisting in the integration of new parts that fit and worked the first time.
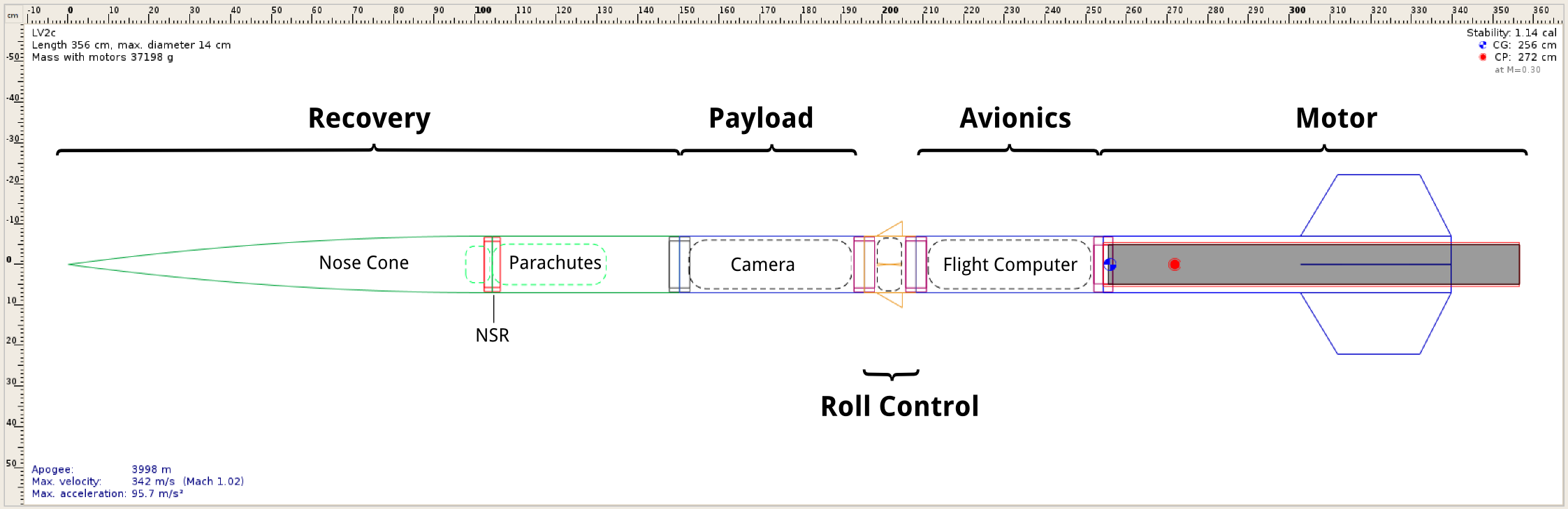
We also created a model in OpenRocket off the Solid Works data which resulted in accurate simulations of the flight.
Simulation
We ran a simulation of the flight using OpenRocket. This gave us lots of data for our expected performance.
Simulated Launch Data
This is the data run in advance, not taking into account the measured mass or cg, instead values taken from the Solid Works model.
| MKS | Imperial | |
|---|---|---|
| GLOW | 29.5 [kg] | 65.0 [lbs] |
| CP (from tip of nosecone) | 2.72 [m] | 107.0 [in] |
| CG (from tip of nosecone) | 2.56 [m] | 100.7 [in] |
| Burn Time | 7.7 [s] | 6.45e-6 [fortnights] |
| Apogee | 4616 [m] | 15,146 [ft] |
| Max Speed | 358.9 [m/s] (Mach 1.05) | 802.8 [mph] |
| Max Accel | 95.7 [m/s2] (9.75 [g]) | 314 [ft/s2] |

Notes
Pictures
Launch Prep









Launch















From onboard





Video
View of the launch from the flight line.

- Download: launch flightLine short.mp4
- Watch on YouTube: https://www.youtube.com/watch?v=2PoPGujVU5I
View of the lunch from the top of a nearby hill. (Note the speed of sound delay!!)

- Download: launch hill short.mp4
- Watch on YouTube: https://www.youtube.com/watch?v=6P6lFe1y9Hg
We have a number of stills from Casey's camera taken at 20 fps. Here they are rendered together into a video:

- Watch on YouTube: https://www.youtube.com/watch?v=1fD8NFaxiMs
Onboard camera video from the flight, starting just before ignition and lasting until just after touchdown.

- Download: psas-lv2c-2010-06-27-short.avi
- Watch on YouTube: https://www.youtube.com/watch?v=vKw75YMiLA0


Launch Data
Flight at a glance
Actual Recoded data from the flight:
- Motor: AeroTech N2000-W
- Liftoff Time: 2:44 pm PDT June 27th, 2010
| Metric | MKS | Imperial |
|---|---|---|
| GLOW | 30.8 [kg] | 67.9 [lbs] |
| CG (from NSR seam) | 1.357 [m] | 53.44 [in] |
| Apogee (from TeleMetrum) | 4784.94 [m] | 15,699 [ft] |
| Max Speed (from TeleMetrum) | 374.83 [m/s] (Mach 1.10 - sea level) | 838.5 [mph] |
| Max Accel (from TeleMetrum) | 102.93 [m/s2] (10.5 [g]) | 337.7 [ft/s2] |
Raw data
All of the raw data is in the raw data folder for this launch
TeleMetrum
TeleMetrum flight data:
- "Raw" ASCII data from the EEPROM: telemetrum.eeprom
- Processed log: telemetrum.telem
- Simple tab delimited file: telemetrum.detail
- KML (Google Earth) file: telemetrum.kml
ARTS2
Raw data from the ARTS2 flight computer
- Raw data in ARTS (proprietary) format: ARTS2.odf
- Plain CSV of the data (imperial units): ARTS2.csv
- Plain CSV of the data (MKS units): ARTS2 MKS.csv
Roll (CAN logger)
- A CSV dump of the raw data CAN converted.csv
Opal
In addition to the rocket flight computers we had a piggyback payload of an experimental motion recording device from the medical world. It contains a 6DOF IMU and 3-axis magnetometer. It was never designed for such a harsh environment, but nevertheless has recorded very interesting data.
- Plain CSV data in MKS units: opal.csv
Data Analysis/Conclusions
Fin Flutter
Careful viewing of the on board camera footage shows the fins fluttering for about one second around frame 31535. Liftoff was on frame 31423. At 30 frames per second this suggests the flutter happening about 3.7 seconds into the flight. This would correspond to the transonic region of flight right as the rocket enters Mach 1 according to both simulations and the flight computers.

The above image shows two nearby frames from the on board camera with the right fin highlighted. In frame 31535 the fin is painted red and in 31537, blue. On the right the two images have been stacked and the fin highlights compared. The fin appears to undergo a flutter with an amplitude of about 4°s.
Conclusion
In general fin flutter is not a good thing. Oscillations can exceed material shear strength and break off fins resulting in catastrophically unstable flight. We are probably fine, but stiffening the fins won't hurt.
Roll Control
The roll control was only a partial success. The mechanical and software systems appeared to work as designed. However we appeared to experience a "control reversal" where fins placed in the counter clockwise arrangement caused the rocket to rotate in the clockwise direction and visa versa. The cause of this problem is aerodynamic in nature and is under investigation.
Acceleration Data
Here is a graph with a comparison of the raw data from the 3 on board computers that had accelerometers. They were all single axis accelerometers aligned vertically. They only capture vertical acceleration and so are only useful from launch to apogee.

Here is the acceleration just during the motor burn. There seems to be an interesting shoulder around the transonic region.

Taking all this data we created an averaged result by putting all the data into 50ms bins:

Download the binned data: accel binned.csv
Comparison with OpenRocket
This was our first launch using OpenRocket as our primary pre-launch simulation engine. Here we compare our recorded acceleration to the simulation. On the whole it did quite well. We suspect that the thrust curve that it had on file for our engine was not very accurate (or at least our motor deviated from it).

Here is a close up of just during the burn.

Velocity
Taking our binned/averaged data we can integrate to find the velocity at each point:

Drag
After the motor burns out we should be able to find all the forces on the rocket; drag and gravity. Gravity is easy to predict and knowing the mass and acceleration we can solve for drag force:


Knowing the Drag force, height of the rocket, and velocity of the rocket we can estimate the Cd empirically. We simply solve for Cd.



This technique does not appear to work very well, unless OpenRocket is just very wrong about drag. Which is possible. The technique is very sensitive to having the correct velocity.