Launch of LV2.3 with roll control

PSAS successfully launched "Launch Vehicle No. 2.3" (LV2's third airframe) with a roll control module and "spin can" on Sunday October 17th, 2010 at Oregon Rocketry's (OROC) Brothers' launch site.
On-site video analysis confirmed that the roll control module and spin can worked!
For more details on the launch logistics, please see the logistics page.
Pictures
Prelaunch






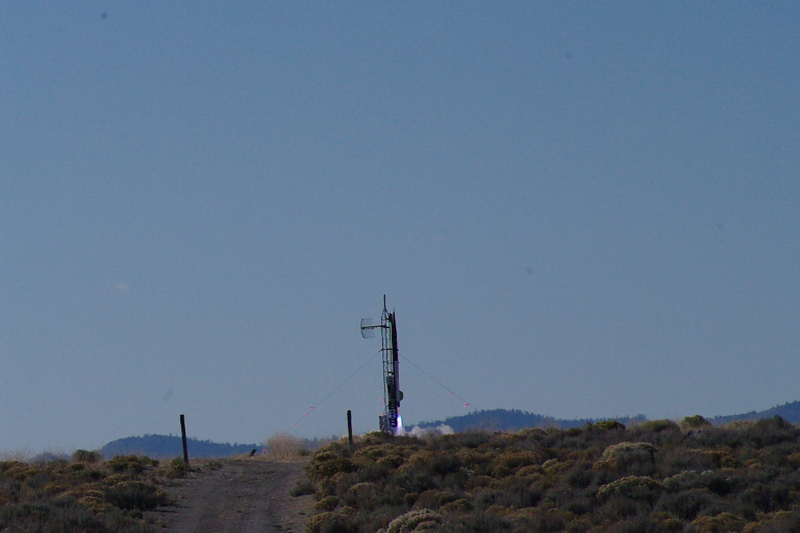
Launch!







Recovery









Video
Video from the launch:
View from Mission Control
High speed footage of liftoff:
Onboard video from liftoff to apogee
Here you can see the rocket liftoff and do its programed rolls. The rocket continues straight for a few seconds and then turns counterclockwise 90° then a few seconds later turns 180° clockwise and continues to make 90° rolls every few seconds. Our control system worked!
Onboard video from liftoff to touchdown
The full video from onboard - Download an mp4: On Board LV2.3 with Roll Stabilization.mp4
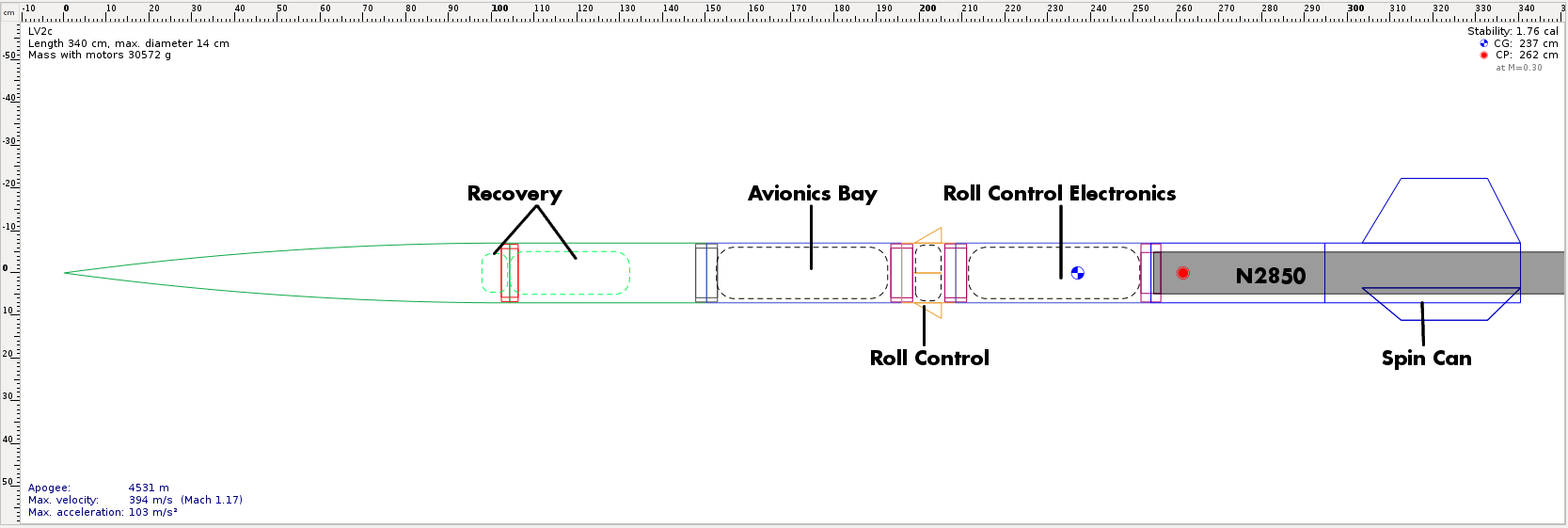
Design Overview
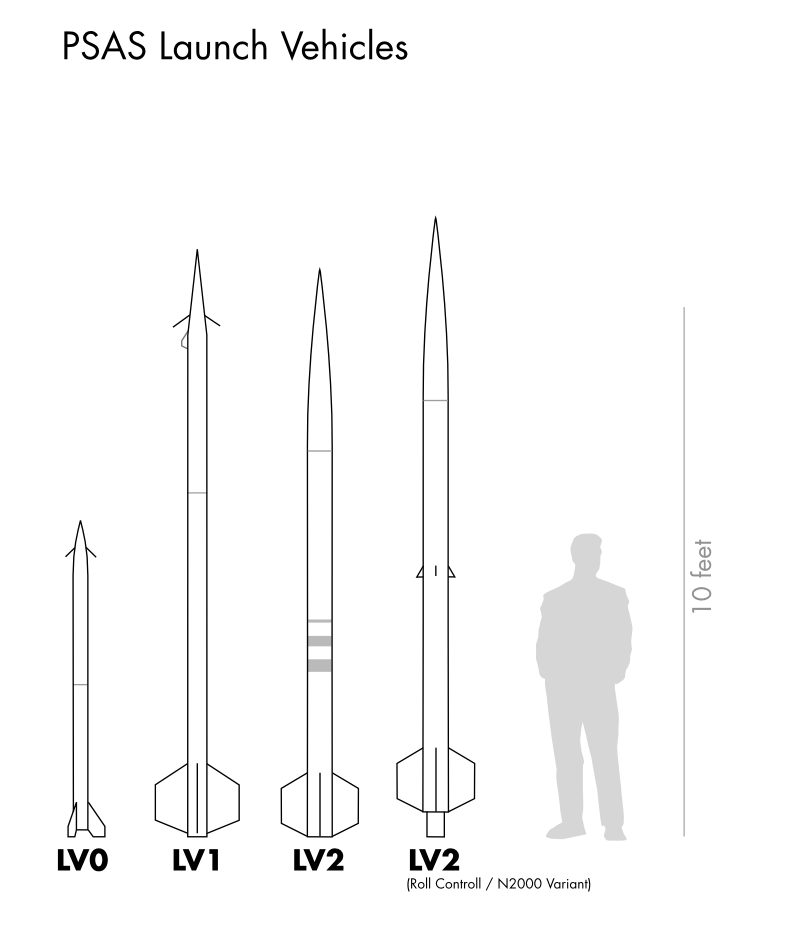
The airframe is the third iteration of our LV2.3 rocket. We have been modifying it since 2009 to be a test bed for active stabilization.
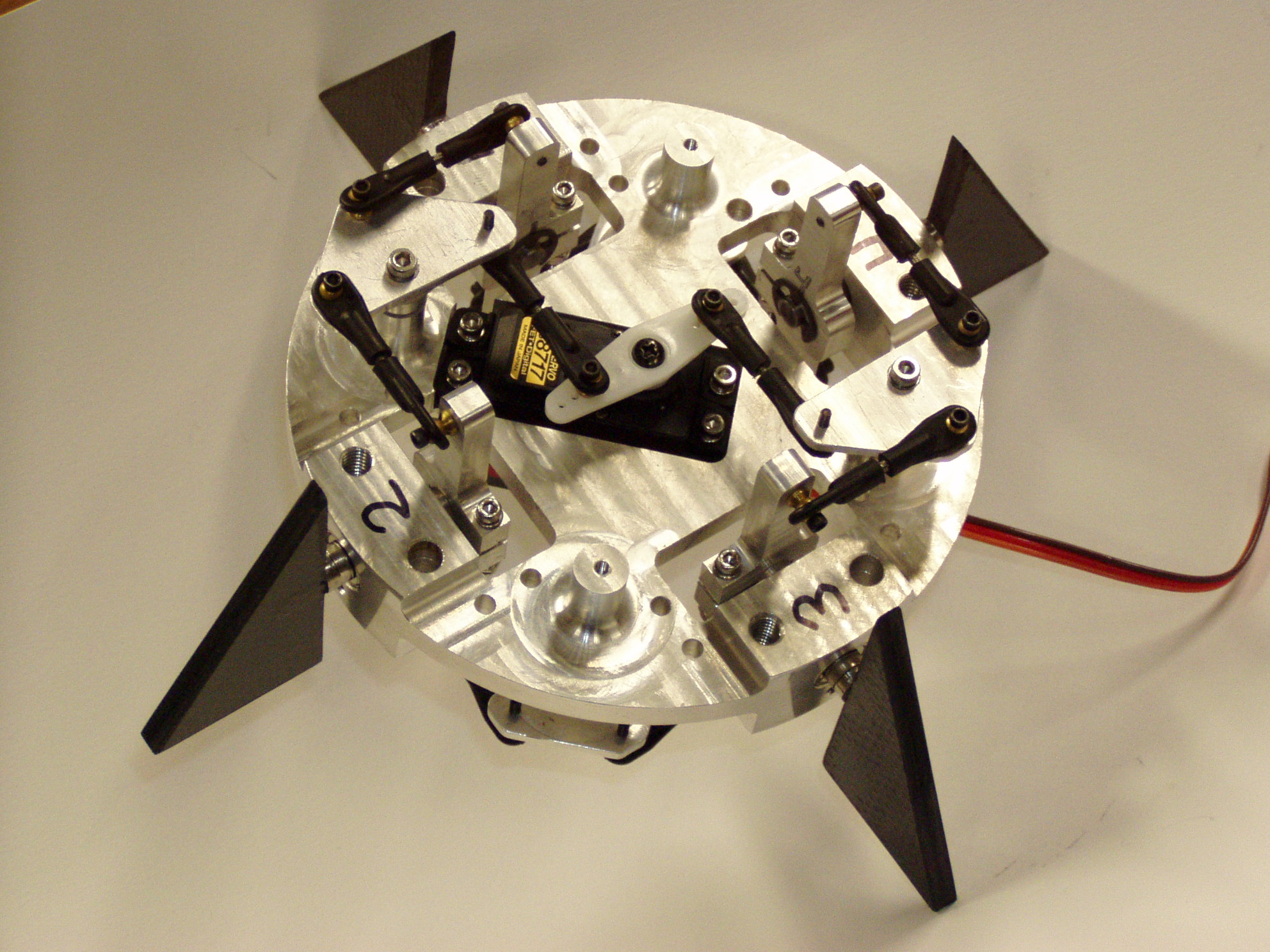
Our last flight was our first test of the roll control module. This was designed to be able to control the spin of the rocket. Unfortunately the last flight was unsuccessful because of unintended aerodynamic interactions between the canards and the static fins. In order to fix this we isolated the spin of the rocket from the spin of the static fins by putting the fins on a free spinning bearing.


- Download the OpenRocket file for this launch
Launch Simulation
We used OpenRocket to simulate the flight. Here are the simulated flight parameters.
| MKS | Imperial | |
|---|---|---|
| GLOW | 30.57 [kg] | 67.39 [lbs] |
| CP (from tip of nosecone) | 2.62 [m] | 103.1 [in] |
| CG (from tip of nosecone) | 2.37 [m] | 93.3 [in] |
| Total Lenth | 3.59 [m] | 141.3 [in] |
| Burn Time | 4.5 [s] | 3.72e-6 [fortnights] |
| Apogee | 4779.5 [m] | 15,681 [ft] |
| Max Speed | 399.8 [m/s] (Mach 1.2) | 894.2 [mph] |
| Max Accel | 103.9 [m/s2] (10.59 [g]) | 340.9 [ft/s2] |
| Motor | CTI N2850 |
Data
Raw Data
- TeleMetrum eeprom dump 2010-10-17-serial-221-flight-003.eeprom (164K)
- ARTS-2 raw data (binary "ODF" format) oct 2010 psas launch arts data.odf (128K)
- Raw dump from roll control CAN log 10-17-10 13-29-13.asc (181M)
- CSV of the data from the Opal IMU 20101017-104441 sensor data.csv (422M)
Opal
The Opal IMU was added like last time, but because it is a medical device and not meant for high-g environments it was attached at approximately a 45° angle to the ground. This requires some extra work on the analysis side. Also the IMU was running for hours before and after the flight. Even finding the relevant data is a bit tricky.
Here is a minimally processed (includes raw data) of the flight:
- Opal launch.csv (7.6 MB)
To make this more useful we took the five seconds or so of accelerometer data before launch and averaged it in each axis. We then found the rotation vector between 1 g down and the averaged accelerometer vector while it was on the ground. This allows us to rotate the data to psudo-body coordinates (assumption that the vehicle was vertical so ENU == body coords). Once that was done 1 g was subtracted (gravity) and the time was converted from long integer representation to mission time (floating point seconds with 0 defined as the moment of launch). We also don't really care about anything except launch (or, say, T-0.1) to apogee (NSR-sep). Also all the raw data was ignored so only time, acceleration, rotation, and magnetometer data was left (in MKS units) This pared down, time offset, body-rotated dataset is here:
- Opal launch rotated.csv (363 KB)
A longer dataset that goes through apogee (to T+40 seconds) is here:
- Opal launch rotated 0-40s.csv (491 KB)