Participants: Andrew, Paul, Nate (Davenport), David, Nathan (Matsuda), Bart, James, Larry, Jamey. New folks: Greg (Cheong)
We created a project timeline for the 8/3 launch. It's incomplete, but it started us going and only took an hour to put together. Here's a picture of the timeline:
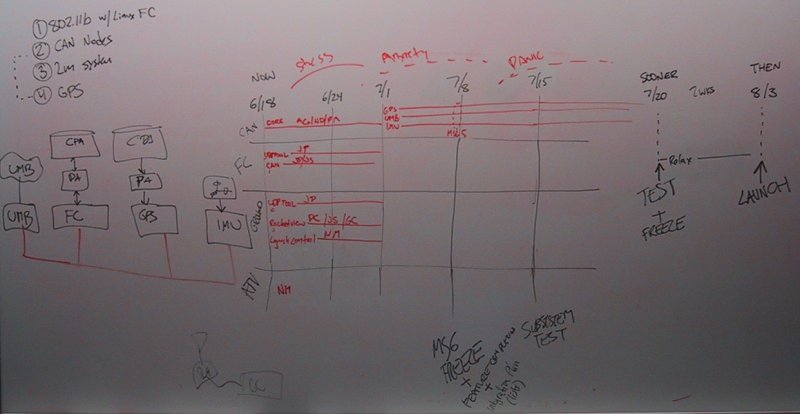
Working backwords, we launch August 3rd. Two weeks before, we freeze code after the full systems test on Saturday July 20th. A week before that, July 13th, we put each system together for subsystem tests. A week before that, July 14th, we call a feature freeze which means all CAN messages are frozen, all features are called complete, and we come up with the final integration lists (the lists that tell us what to bring and the order to connect them up).
We broke the avionics system into three parts:
CAN Nodes: Basically PIC18F458 firmware since the boards are complete - we'll take two weeks to finish up the core drivers, and then we'll spend the next three weeks working on the individual node applications (IMU, GPS, etc).
FC: James (with help) will be working on a UDP tool to test the 802.11b... the tool will run on the FC and ground computer and log packet statistics on 802.11b link. There's also the CAN driver and CanMuxer code, of course.
Ground Systems: We've got rocketview, the launch control software, and the UDP tool to run from the ground.
ATV: Andrew's secret agenda is to get the ATV system working so we can broadcast down the image for PR value, and have the GPS lat/lon displayed using the overlay board.
After the timeline talk, we broke into groups:
- Jamey, Dave, Greg and Nathan talked the new Java implementation of RocketView. The results are on the RocketView page. Part of this work will contribute to LaunchControl, which is otherwise basically complete.
- Andrew, Nate and Paul organized meetings over the next few weeks for CAN node firmware.
- James gave a quick demo of Twiki and created accounts for Nathan and Greg, and otherwise worked on Twiki pages.
To do:
- Nathan and Paul are getting their CAN node development systems up and running by Sunday morning.
- Andrew is finishing up the CAN drivers for the PIC CAN nodes.
- James to commence work on UDP tool and look into forward error checking and correction
- James to debug the can driver to can muxer to client integration.
- Jamey, Nathan, Greg, and David have task assignments on the RocketView page.