Trackmaster 3000 Homepage
Project Goals
It would be really neat to build a piece of hardware to track the launch vehicle as it launches! This will obviate the need for an error-prone human to point antennae at the vehicle. Further uses for the hardware developed in support of the TM3K project include (but are not limited to: - Camera mount for "eyes" on the rocket for duration of flight. - Miniaturized version of TM3K hardware to mount on balloons or helicopters. - Further miniaturized TM3K hardware for inside launch vehicles for parallel vehicle observation.
Design Requirements
Features
- Minimum 2-axis motion with no gimbal lock in the positions above 20 degrees elevation.
- E-stop button to disconnect power to servo drives.
Payload
The exact camera / antenna payload isn't defined. Instead, the intent is to design to a general set of antenna parameters.
Dimensions
A cylinder, 4 inches in diameter and 24 inches long.
Mass
10 lbs, evenly distributed over the length of the cylinder.
Tracking performance
- Must track rocket leaving the launch pad at up to (14?) g's acceleration.
- Must track from a minimum (2000?) foot distance to the launch pad.
- Nathan, what rotational rate and rotational acceleration is this??
Trackmaster Motion
Power Requirements
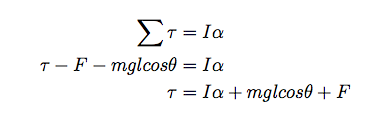
To spec the motor correctly we need to know the max torque we'll need to supply at the motor. To obtain that, we draw a free body diagram of the TM3K and identify forces (scan forthcoming).
We see from the FBD that the only forces acting on the TM3K are gravity, the torque applied by our motor, and friction countering our motor. Say that the sum of the torques applied to the TM3K is equal to the moment of inertia multiplied by the angular acceleration. Assuming that friction is independent of speed and acceleration;
Work in progress (sandbox)
![f [Hz] = \frac{ \sqrt{ k / m}} { 2 \pi}](./3ebed49085956d11f306f3eabc618535.png)


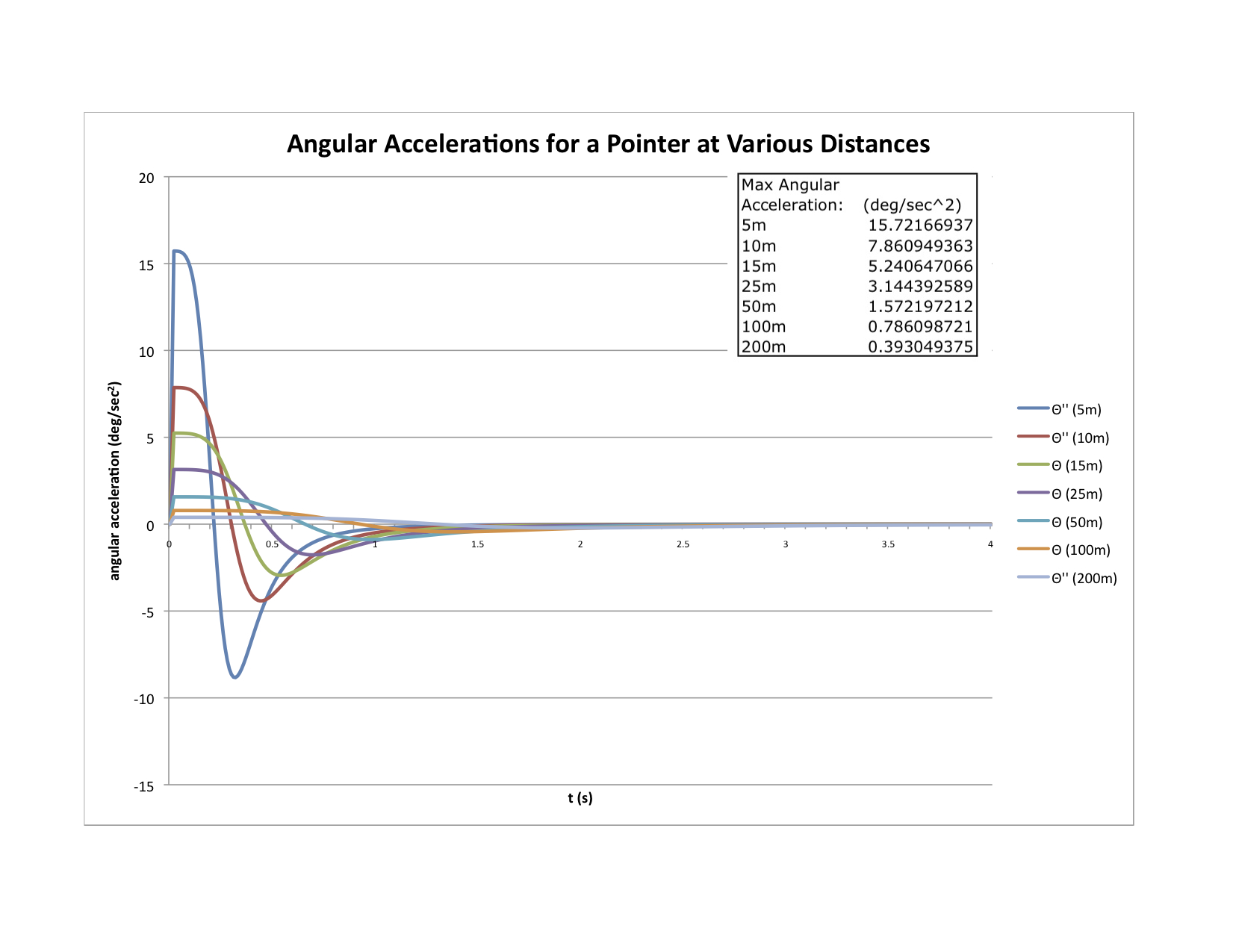
This algebraic manipulation reveals that we can obtain torques for a variety of angular accelerations. CAD software estimates the mass of the gimbal at 9.516 kg and the moment of inertia to be 2.25 kgm2. To simplify the math, assume that max rotational acceleration occurs at θ = 0:
 (rad/sec2) (rad/sec2) |
 (N*m) (N*m) |
|---|---|
| 0.27440066499855 | 0.61740149624673 |
| 0.13720033249927 | 0.30870074812337 |
| 0.091472706097023 | 0.2058135887183 |
| 0.054873151682702 | 0.12346459128608 |
| 0.027436575841351 | 0.061732295643039 |
| 0.013718287920675 | 0.03086614782152 |
| 0.006859143960338 | 0.01543307391076 |
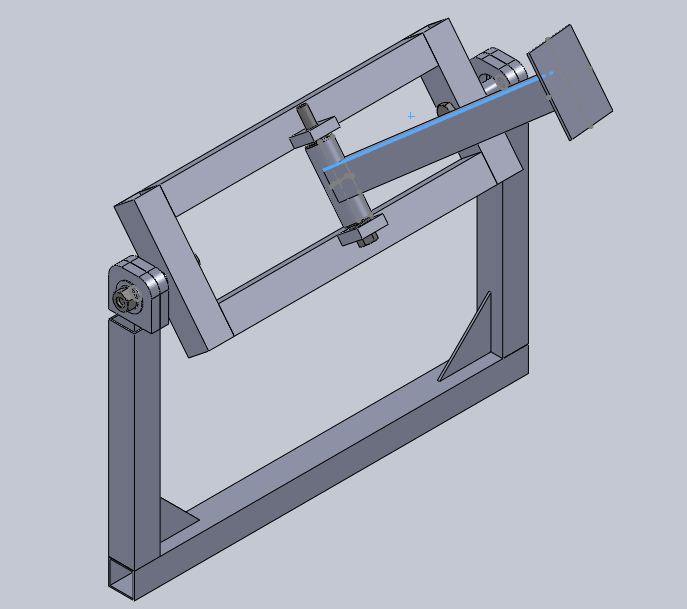
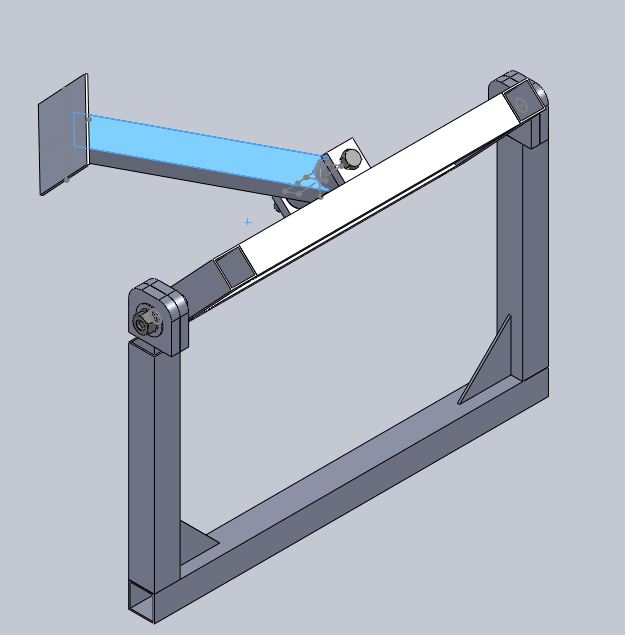
Design Concepts
At present, the design under consideration consists of 3 main 'weldments':
- Stand - This part supports the tracking machine, anchoring it to the ground with a stable base.
- Yoke - This component interfaces the moving gimbal to the stand
- Gimbal - This component allows movement of the antenna in a horizontal (elevation) axis
- Pedestal - This component allows movement in the lateral axis from the gimbal and provides the mounting surface for antennas/cameras