The LV1a payload module includes the following components:
- A color CCD video camera with an ATV transmitter,
- a 2400bps digital data downlink for telemetry data,
- a 2m amateur radio DTMF-activated uplink for manual recovery system control,
- accelerometers and rotational gyro's measuring 3 linear axes and 3 rotational axes,
- pressure and temperature sensors, and
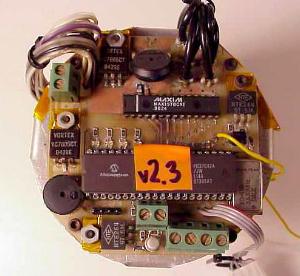
- a flight computer powered by a PIC17C42 microcontroller for flight sequencing.
The accelerometers and rotational gyros form an Inertial Measurement Unit (IMU) with 6 degrees-of-freedom (6-DOF) which will serve as a prototype for the development of a future Inertial Navigation System (INS).
?Image1.gif
{kind=link}