Current LV2 Avionics System Block Diagram
LV2's avionics system is meant to be a flexible and modular avionics system for small sounding rockets (and possibly small Unmanned Aerial Vehicles (UAVs)). The avionics system is a test bed for an amatuer autonomous active guidance system - meaning a system that will actively guide the rocket along a given trajectory (e.g., an orbital trajectory).
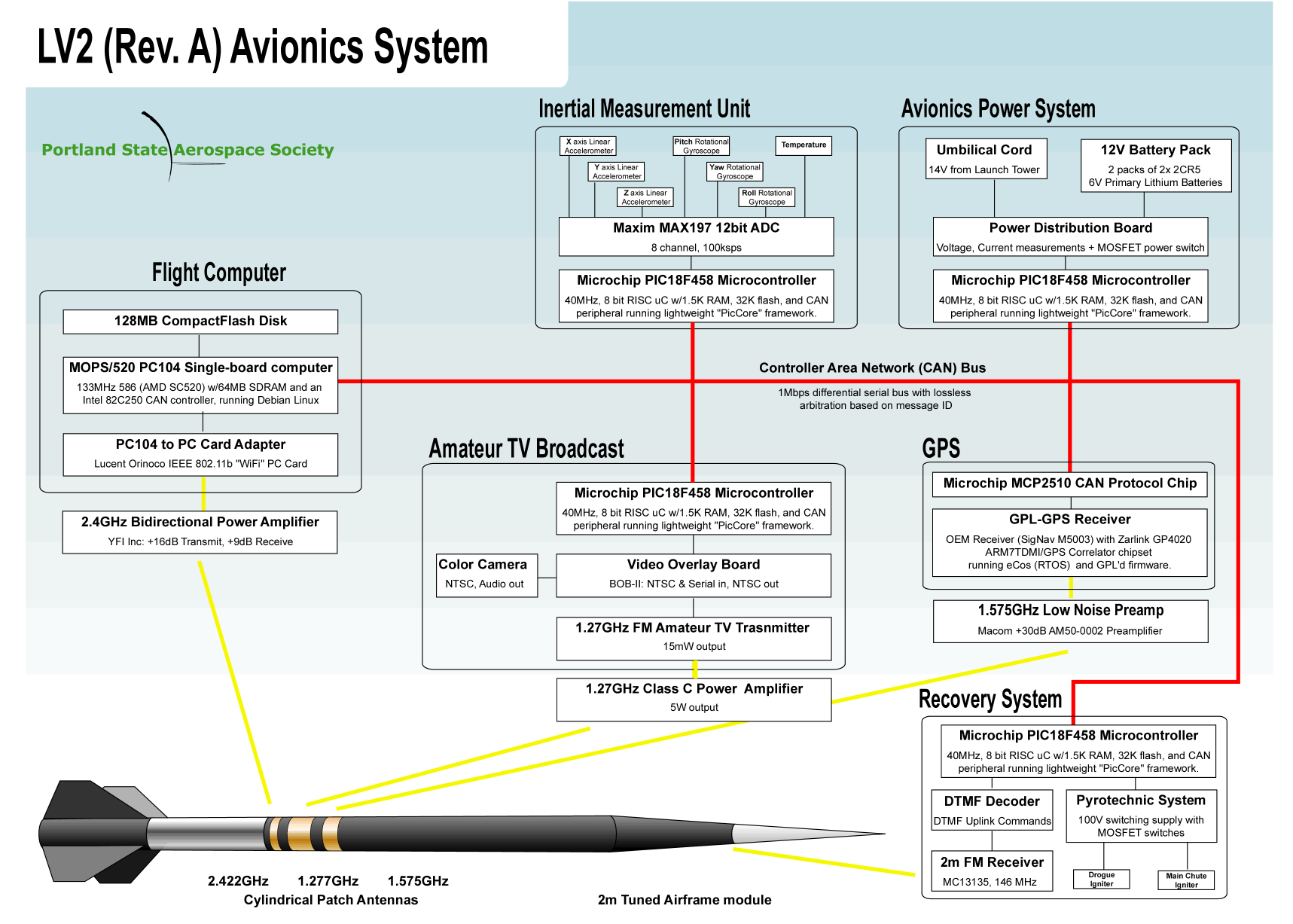
Our FlightComputer (FC) is a PC104 form factor 133MHz AMD SC520 ("586" class) processor with 64MB SDRAM and a 128MB CompactFLASH card as HD running Debian Linux 2.4.18. When we start doing critical RealTime tasks, we'll switch to a suitable RTOS; we already used Adeos to get real-time interrupt processing in our CAN driver, which otherwise was losing messages.
The FC is connected to the rest of the avionics modules using the CAN bus (Controller Area Network Bus), which is a robust 1Mbps priority-arbitrated multi-drop serial bus.
Each of the small CAN nodes are Microchip's PIC18F458, an 8 bit microcontroller with a CAN protocol peripheral on-chip. Current CAN nodes include:
- 6DOF Inertial Measurement Unit
- Open Source GPS receiver
- Pressure and temperature sensors
- Pyrotechnic actuators for the recovery system, with a 2m amateur band radio for emergency manual control of the pyrotechnics.
- Power (Smart Battery controller) and Umbilical Management
- Amateur TV transmitter with video overlay board
Future nodes we hope to have are:
- 3D Magnetometer (compass)
- Pitot tubes
- Strain gauges
- Thrust vector control actuators
Communication to the ground is via a power-amplified 802.11b (sometimes called "WiFi") wireless link.
For more information, please see links off of the Avionics Team Homepage.